AI + Robotics
Full-Stack Robotics R&D: Hardware & Software Integration
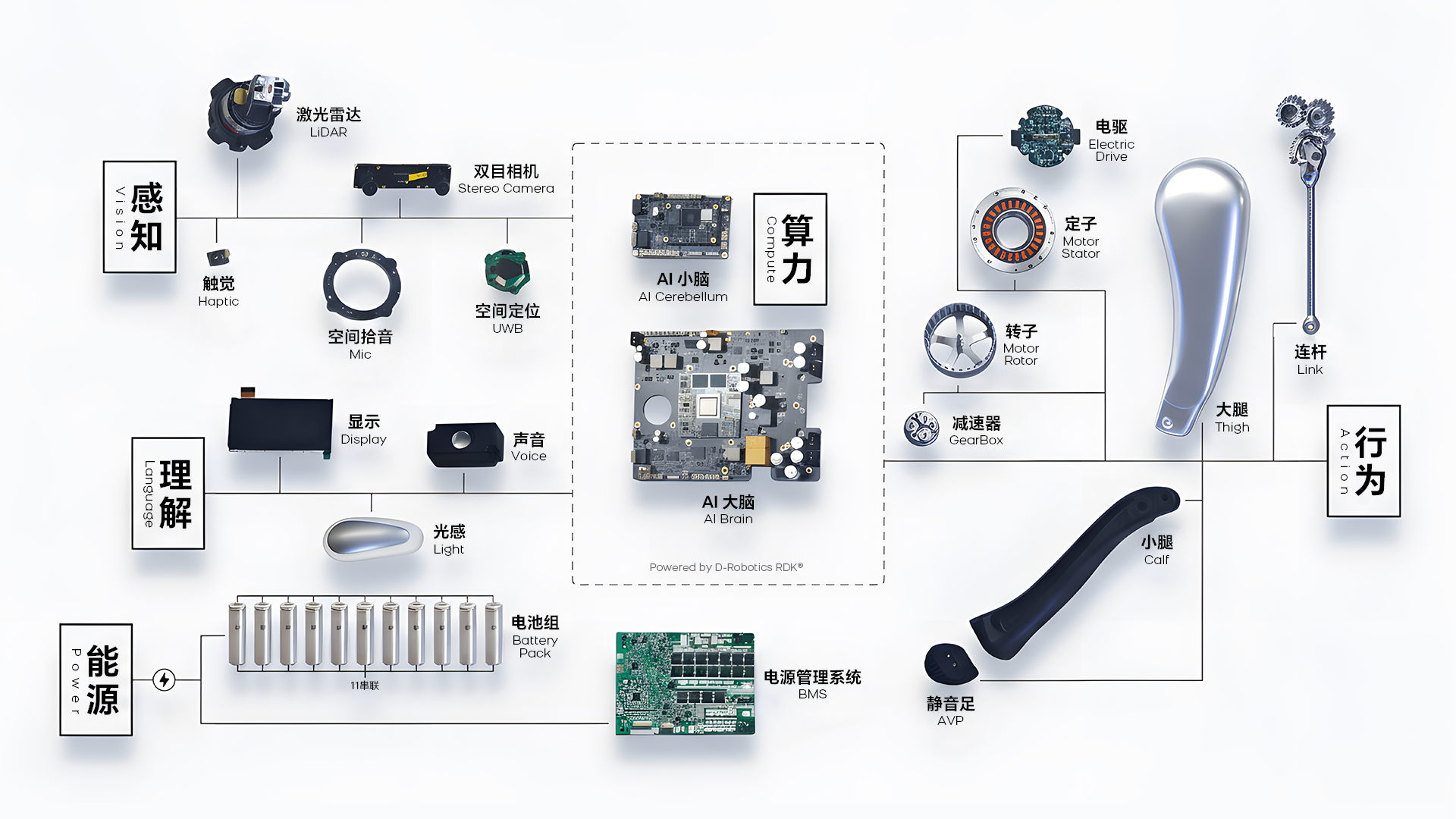
Robot Hardware Platform
The core components of a robotic system are categorized into Perception (V), Cognition & Interaction (L), and Action (A), interconnected through computing power and energy solutions. Our robotics development begins with foundational hardware design.
Physics Simulation
We create URDF (Unified Robot Description Format) files to digitize robotic structures by defining geometries, kinematic properties, and physical parameters. The higher the fidelity to real-world physics, the more efficient the model training becomes.

Model Training
To tackle the complexity of dynamic real-world environments, we built a data infrastructure bridging physical and digital realms. Our world models empower robots with transfer learning capabilities, accelerating reinforcement learning and imitation learning efficiency.
Real-World Deployment
Robots designed for homes and individuals operate in open-ended environments, demanding extensive real-world testing. We established closed-loop data validation during prototyping and launched large-scale cross-scenario testing across 10 cities.